

-
【科普】CORS工作模式的基本原理
CORS工作模式:在某区域内,建立若干个连续运行的基准站,根据这些基准站的观测值,建立区域内GPS 主要误差模型,一旦接收到移动站的概略坐标,即在移动站附近建立起一个虚拟参考站,移动站与虚拟参考站进行载波相位差分改正,实现实时RTK,达到厘米级定位结果。
RTR技术需要至少两台设备,由一台设备作为基准站在某点固定播发差分数据,另一台设备作为移动站实时测量点位,获取厘米级定位结果。
-
【科普】电离层对定位精度有哪些影响
GNSS卫星信号在穿过电离层时,其传播速度和方向都会发生改变,传播路径也会发生轻微的弯曲,使得卫星信号产生偏移和延迟,从而影响接收端的定位精度,随着时间和地点的变化,定位误差从几米到几百米以上GNSS卫星信号在穿过电离层时,其传播速度和方向都会发生改变,传播路径也会发生轻微的弯曲,使得卫星信号产生偏移和延迟,从而影响接收端的定位精度,随着时间和地点的变化,定位误差从几米到几百米以上。
如下图所示:纬度越低,电离层中电子含量越高,电离层越活跃;TECU表示电子含量的单位,1TECU对应约0.16m的测距误差;
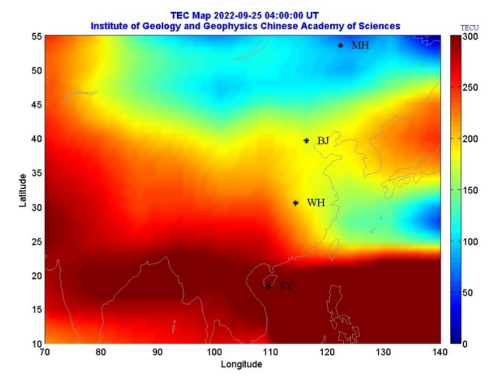
一般来说阳光越强烈电离层越活跃,一天之中14时左右电离层达到峰值;一年中春秋季节电离层活跃程度明显高于夏冬季节;电离层还受太阳活动、地磁活动等因素影响,且这些因素都是不断变化的,所以说电离层往往呈现非常复杂的变化规律;
-
【科普】单系统定位对比多系统对精度有多大的影响,不同系统在定位中的比重是否有权重取舍?
K8模块支持单系统和多系统定位。环境良好且卫星数足够的情况下,单系统和多系统定位的差异主要体现在初始化速度上,没有单一系统对定位精度的影响这一说法。在复杂场景下,对于RTK定位,多系统有更多的观测数据可用,维持固定的能力更强、恢复固定的速度更快。定位结果影响因素很多,多系统融合定位可以更好的消除一部分误差;
GPS和BDS的可见可用卫星数是占比较高的,应该首先保证这两个系统的可用性;采用多系统进行定位时,常用的加权方式是高度角加权,也会考虑信噪比等其它一些因素对具体卫星进行取舍或加权,一般不会针对某一系统去整体调整权重。
定位的精度主要与各卫星的观测量精度以及所有卫星构成的几何构型相关,具体来说,如果部分卫星观测量精度较差且没有被算法识别,定位精度通常会降低,正确识别并剔除问题卫星可以保证定位精度,如果卫星剔除过多导致几何构型恶化严重,定位精度也会变差。
-
【科普】多径的定义及影响
在各种电磁信号在接收机附近的表面(比如屋顶、地面、建筑物等)产生反射是很普遍的。这种距离<20m的反射信号,与真实信号相比,只有很短的延迟。这就是多路径现象,这种现象造成的干扰,就是多路径干扰。
它距离短,延时短,常常是影响接收机性能的主要干扰之一。多路径对载波相位测量的影响可达到波长的四分之一,即约5厘米。多路径对伪距测量的影响可达到1.5倍信号长度,通常是几米。理论推导,最大约为5米。
-
【功能】PPP技术的定义以及优势,钦天导航PPP&RTK技术的特点、产品及相关应用行业
一、PPP技术,全称精密单点定位技术(Precise Point Positioning),是指利用全球或区域基准站点,对卫星轨道、钟差、电离层延迟等进行实时估计,通过网络或卫星直接播发给终端用户。
优势:
(1)使得用户端系统更加简化,不需要现场架设基站或者使用网络CORS服务。
(2)在定位精度上可保持全球一致性。
二、钦天导航将PPP技术和RTK技术的优势结合起来,推出PPP&RTK算法。
特点:当搭载钦天导航高精度GNSS RTK模块的设备运行到无网弱网区域时,可以无缝切换星基服务,通过直连卫星接收Galileo-HAS和BD3-B2b的高精度PPP信号,获取定位信息,实现高精度定位。
产品:K823、K803、K825。
应用:精准农业,智能驾驶、测量测绘等。
-
【功能】PPP&RTK技术常见问题
(1)K8模块PPP使用的系统频点有哪些?
K8模块最新RTK+PPP固件使用的GPS+BD3+GAL融合解算;ppp-b2b使用的是b1c+b2a+b2b单独的频点。
(2)E6B播发的PPP-HAS信号,是所有伽利略卫星都可以播发吗?
HAS这个服务是通过一种冗余编码的方式播发信息,一部分卫星在播发,用户只要收到一定数量之后,通过转换就能还原出全部的信息。
(3)K8模块使用的PPP框架和历元
是ITRF最新框架下最新历元。
PPP结果是ITRF框架下的坐标,如果RTK是使用中移或者千寻CORS,大部分都是WGS84坐标系,两个坐标系的不同会导致结果上有固定偏差,一般有十几公分到几十公分不等;如果是自建基站,这个偏差可能会更大。针对这个问题,K8模块针对性做两个坐标系偏差补偿和平滑过度的功能。
-
【功能】K8模块的EVENT功能,在无人机行业中如何应用
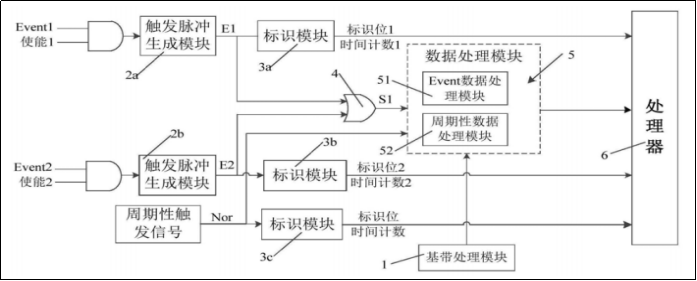
当高精度模块EVENT监听器收到一个外部脉冲信号时,模块即时输出该信号输入时刻的时间与空间信息,该功能的主要意义在于能够记录事件发生的精准时刻以及精确坐标。
包括如下步骤:在有事件发生时对事件设置唯一标识并记录时间信息用于区别事件来源,事件合成模块用于将多事件合成单事件供后续设计使用,处理器完成事件的识别和处理,技术实现流程如下图:
优点:节省资源、实现结构简单,并不仅限于GNSS领域,也能用于其它应用领域。
应用案例:
航空摄影测量时在获取摄影测量照片时就需要拍摄的时刻与坐标信息用于后续成图处理,此时就需要使用到 EVENT 功能,当按下相机快门的刹那间由相机输出一个脉冲信号给到 GNSS 板卡,板卡在收到该脉冲信号后打印出信号输入的时刻以及坐标信息,即照片拍摄时刻与拍摄内容的地理位置,从而完成一次事件触发与记录。
-
【功能】K8模块的抗干扰技术及应用行业
K8模块内置抗连续波干扰模块和抗窄带干扰模块,能够在信号频点存在一定强度干扰信号的情况下,通过简单的设置,快速检测并消除干扰来减少故障时间,保持卫星跟踪,正常定位。同时,该技术还可以输出干扰源的频谱图,用于判断干扰类型和可能干扰源,干信比可达50dB,开启功耗仅需0.1W。
例如:在无人机上,可以提高钦天模块定位性能和稳定性,保证模块在上机之后不会因为干扰而出现炸机。
应用方向:无人机,割草机等行业。
-
【功能】钦天导航有哪些产品支持单北斗,精度及优势
产品:K803G、K823G、RD02
精度:H:8 mm+1ppm ,V:15 mm+1ppm(RTK)
优势&特点:
(1)单北斗多功能:支持BDS-2、BDS-3卫星系统信号跟踪,高性能的定位定向。
(2)全国产化:芯片和元器件等100%国产化,自主可控。
(3)低延迟高更新率:延迟低≤50ms,位置信息更新率可达 20Hz
(4)抗干扰:内置窄带和连续波抑制模块。
应用:适用于测量测绘、机器人、地基增强等领域。
-
【功能】钦天的单北斗模块RD02使用方式及优势
RDO2模块支持,有以下优势:
(1)支持短报文通讯: 支持BDS2/BDS3短报文通信系统,具有接收S频段出站信号功能,以及具有生成L频段入站信号功能: 单条报文最多可发送1000个汉字。
(2) 高可靠性: 采用工业级器件,-40°C~+85°C下均能正常工作
(3)拓展功能丰富: 可支持北斗RDSS导航定位功能、短报文通信功能及卫星授时功能
(4) 高通用: 内置LNA,实现对北斗短报文卫星信号放大。
-
【使用】钦天的割草机方案和竞品相比的优势
我们整体解决方案具有优兼容、高性能、易集成等优点,具体优势如下:
RTK优势:高固定率、高可用性
数传优势:通过CE/FCC认证、支持扩频技术、支持自适应配对功能、支持干扰频段避让功能
天线优势:全系统全频点、支持全球频段、可集成4G/蓝牙/wifi天线
-
【使用】智能割草机器人对比传统割草机的优势
优势有:(1)无需预埋线,成本降低;(2)无惧雨雪等恶劣天气,正常工作;(3)自主规划路线,提升工作效率及美观度;(4)防碰撞,安全性提升
-
【使用】数传产品应用在割草机领域的优势
我司的数传模块支持自适应配对、支持干扰频段避让、电磁兼容优、支持扩频技术。
-
【使用】RTCM32差分数据的获取方式
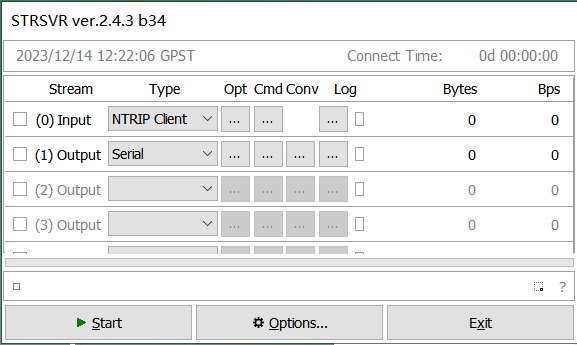
1、使用rtklib软件获取差分数据:
【打开strsvr.exe程序】-【Input设置差分数据源】-[Output设置差分数据源输出源】-【Strat】
2、通过司南 GNSS 自动化分析软件 Compass Port Utility,获取差分数据
【打开软件】-【点击云图标】-【进行配置】,通过端口配置通讯方式:可选择 TCP Client 或者串口两种方式进行连接,获取差分数据。

3、通过司南 GNSS 控制软件 Compass Receiver Utility(CRU)获取差分数据
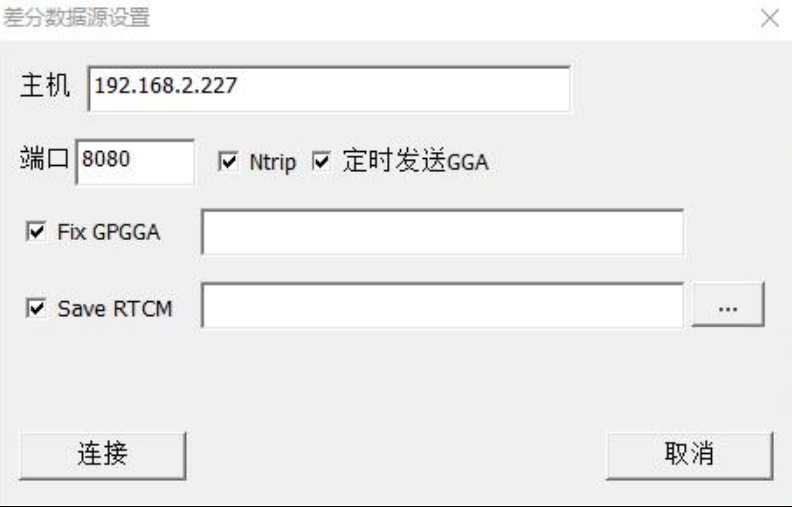
Ntrip是一种通过互联网进行RTCM网络传输的协议,主要用于连接CORS系统, 点击快捷键栏中“差分”按钮,输入主机,端口,选中
Ntrip,进入Ntrip Souce Table选择界面。选中Ntrip 会点亮“定时发送GGA” 勾选项,选中即发送GGA 数据给控制中心。选中所需要的源列表(Mout Point),输入用户名、密码,点击OK,即可连 接CORS中心。 在软件界面的右下角,如下图,可以看到当前连接主机的差分数据量。
-
【使用】GNSS测试时,模块的搜星数、卫星信噪比多少合适
正常测试时,在空旷对天的环境中接入多系统多频天线,搜星数以及信噪比一般:
搜星数:多系统板卡,搜星数一般能达到30颗,搜星数过少,无法固定。
信噪比:最低30 db,信噪比高,卫星质量越好。一般的卫星信噪比在40db以上。
-
【功能】原子钟调试的原理和应用
原子钟是一种利用原子的固有性质来测量时间的钟表,具有高精度、高稳定性、高可靠性等特点,是实现时间校准的理想参考源之一。外接原子钟可以对接收机的钟差进行建模,更好的估计接收机的钟差,提供更高精度的时间参考。
接入原子钟后,接收机会根据原子钟的钟漂对本地的晶振进行驯服,使本地晶振的钟漂与原子钟的钟漂相同,产生的观测量就包含了与原子钟近似的特性,以确保时钟系统的时间准确性和稳定性。
应用方向:原子钟授时,高精度授时。
-
【功能】K8模块载波平滑伪距、单点平滑功能的区别
K8默认是关闭载波平滑伪距的,载波平滑伪距这个功能对单点定位精度、RTK精度和授时精度没有影响;
单点平滑对定位结果有一定影响,开了单点平滑后定位轨迹在一定时间内能够维持得比较平滑,但对绝对精度提升不大,对授时没有影响;
-
【使用】K8模块在请求星历时,ontime和onchange的星历更新逻辑
ontime请求星历的逻辑:按照ontime发送指令后,会输出当前所有跟到的卫星星历,然后每到ontime一次,更新一颗星。
例如北斗跟到了30颗星,指令是ontime 60,那结果就是除了刚发指令的时候星历会全部输出一次,后面每一分钟更新一颗星,半个小时才能更新完全部30颗星星历;
onchange请求星历的逻辑:按照onchange发送指令后,会输出当前所有跟到的卫星星历,然后星历有更新输出所有卫星的星历。