

-
欢迎留下您的第一个问题
我们的专业人员将在最快72h内为您解答,同时欢迎您致电400-060-8030
-
【科普】GNSS全球卫星导航系统
全球导航卫星系统(英文:Global Navigation Satellite System ,缩写:GNSS),是能在全球范围内提供导航服务的卫星导航系统的通称,能在地球表面或近地空间的任何地点为用户提供全天候的3维坐标和速度以及时间信息 。
全球卫星导航系统国际委员会公布的全球4大卫星导航系统供应商,包括中国的北斗卫星导航系统(BDS)、美国的全球定位系统(GPS)、俄罗斯的格洛纳斯卫星导航系统(GLONASS)和欧盟的伽利略卫星导航系统(GALILEO)。
-
【科普】BDS北斗卫星导航系统
北斗卫星导航系统是中国着眼于国家安全和经济社会发展需要,自主建设、独立运行的卫星导航系统,是为全球用户提供全天候、全天时、高精度的定位、导航和授时服务的国家重要空间基础设施。
北斗系统建设实施“三步走”发展战略。第一步,2000年建成北斗一号系统,也称北斗卫星导航试验系统,为中国用户提供服务;第二步,2012年建成北斗二号系统,为亚太地区用户提供服务;第三步,2020年建成北斗三号全球卫星导航系统,为全球用户提供服务。同年7月31日,中共中央总书记、国家主席、中央军委主席习近平出席北斗三号全球卫星导航系统建成暨开通仪式,并宣布北斗三号全球卫星导航系统正式开通。
-
【科普】GNSS/INS 组合导航系统 integrated navigation equipment
将 GNSS 和惯性单元组合在一起,利用其性能上的互补特性,获得比单一设备性能更优的一种导航设备,能有效提高系统的稳定性和可靠性。
K8系列模块具备板载IMU,融合高精度组合导航算法,不惧卫星信号中断,支持三维姿态输出,可满足智能驾驶等应用对于高精度定位的需求。
-
【科普】RTK实时动态测量 real-time kinematic survey
RTK实时动态测量 ()是GNSS相对定位技术的一种,主要通过基准站和流动站之间的实时数据链路和载波相对定位快速解算技术,实现厘米级高精度动态相对定位,是目前使用最为广泛的卫星导航定位给技术。
-
【科普】PPP精密单点定位 precise point positioning
PPP精密单点定位 (precise point positioning)是利用GNSS接收机的载波相位观测值、精密星历和精密卫星钟差实现高精度定位的方式。目前可以播发精密改正数据增强系统有中国的北斗B2b、欧洲的GALILEO HAS、日本的QZSS CLAS以及一些区域的L-band卫星。
-
【科普】大地坐标系 geodetic coordinate system
大地坐标系是以参考椭球中心为原点、起始子午面和赤道面为基准面,法线为基准线的地球坐标系。常用大地经
度、大地纬度、大地高等三个参量描述一个点的空间位置。
常见的坐标系有中国CGCS2000大地坐标系、美国的WGS-84 大地坐标系、俄罗斯PZ-90 大地坐标系。
-
【科普】协调世界时UTC和GPS时 GPST
协调世界时是由国际计量局(BIPM)和国际地球自转服务机构(IERS)保持的时间尺度。它的速率与TAI速率完全一致,但在时刻上与TAI相差若干整秒,与世界时之差保持在0. 9秒之内(UTC尺度是通过插入或者去掉整秒(正跳秒或负跳秒)来调整的,以确保它和世界时之差保持在0. 9秒之内)。
GPS时是全球定位系统建立和保持的时间基准,采用国际单位制秒的无闰秒连续时间。GPST的起始历元为UTC 1980 年 1 月6日的00:00:00,溯源到UTC(USNO)。GPST使用周计数和周内秒表示。
-
【科普】伪距,载波和导航电文 pseudorange、carrier phase and navigation message
伪距是由用户设备测出的卫星导航信号传播时间而计算出的卫星与接收天线相位中心之间的距离,其数值等于用户设备信号接收时刻钟面时与恢复的卫星信号发射时刻钟面时之差再乘以光速得到的距离值;
载波是由卫星导航接收机的载波跟踪环对卫星导航信号的载波进行跟踪测量后,输出的载波相位值与连续观测的载波相位整周计数值之和;
导航电文由导航卫星播发给用户,用于描述卫星运行状态和其他参数的信息数据,通常包括卫星健康状况、星历、历书、卫星时钟改正参数、电离层时延模型参数等内容。
-
【参数】冷启动定位时间和热启动定位时间 cold/hot start time
冷启动定位时间:用户接收设备在星历、历书、概略时间和概略位置未知的状态下,从开机到正常定位所需的时间;
热启动定位时间:用户设备在星历、历书、概略时间和概略位置已知的状态下,从开机到正常定位所需的时间。
K803模块的冷启动时间(增加捕获加速模块)< 20s,热启动时间(使用 RTC)< 10s。
-
【参数】捕获灵敏度和跟踪灵敏度
捕获灵敏度:用户设备在冷启动条件下,捕获导航信号并正常定位所需的最低信号电平。灵敏度以负值为单位,负数值越小,信号强度越低,灵敏度也就越高。
跟踪灵敏度:用户设备在正常定位后,能够继续保持对导航信号的跟踪和定位所需的最低信号电平。
K803模块的跟踪灵敏度:-155dBm;捕获度灵敏度:-138dBm。
-
【参数】K8模块基础参数问答
Q1:K8系列模块的通道数是多少?
K8的模块内部搭载的都是Quantum III芯片,通道数965。
Q2:K8系列模块的限速和限高是多少?
高动态性能:速度支持10km/s,加速度支持10g,线速度支持10km/s;高度无限制。
Q3:K8系列模块RTK定位精度指标?
H≤8 mm+1ppm ;V≤15 mm+1ppm
Q4:K8系列模块供电电压多少?
VIN主供电电源,电压范围:3.3V (直流),电压纹波和尖峰脉冲要求小于50mV。
-
【参数】K8模块支持哪些数据格式
1) 支持 NMEA0183 标准格式数据协议;
2) 支持差分数据格式:RTCM3.X、RTCM2.X 、CMR(GPS) ;支持发射&接收MSM3-7。
3) 具有司南自定义二进制数据输出。

-
【科普】GNSS常见的差分定位模式
(1)RTK(Real Time Kinematic)实时动态测量技术,是以载波相位观测为根据的实时差分GNSS技术,它是测量技术发展里程中的一个突破,它由基准站接收机、数据链、 流动站接收机三部分组成。
在基准站上安置1台接收机为参考站, 对卫星进行连续观测,并将其观测数据和测站信息,通过无线电传输设备,实时地发送给流动站,流动站GNSS接收机在接收GNSS卫星信号的同时,通过无线接收设备,接收基准站传输的数据,然后根据相对定位的原理,实时解算出流动站的三维坐标及其精度(即基准站和流动站坐标差△X、△Y、△H,加上基准坐标得到的每个点的WGS84坐标,通过坐标转换参数得出流动站每个点的平面坐标X、Y和海拔高H)。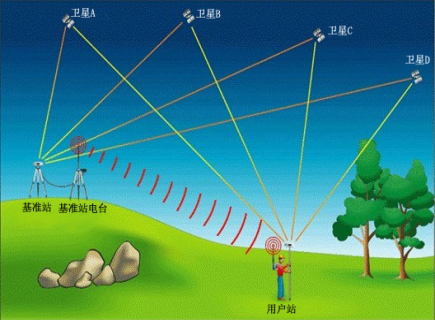
(2) DGPS(Difference Global Positioning System),即差分全球定位系统,方法是在一个精确的已知位置上安装监测接收机,计算得到它能跟踪的每颗GPS卫星的距离误差。该差值通常称为PRC(伪距离修正值),将此数据传送给用户接收机作误差修正,从而提高了定位精度。
(3) PPP精密单点定位是一种全球导航卫星系统(GNSS)定位方法,是服务端利用全球或区域基准站点,对卫星轨道、钟差、电离层延迟等进行实时估计,通过网络或卫星直接播发给终端用户,用户端利用单台GNSS接收机便可实现全球高精度绝对定位的技术。
(4) SBAS(Satellite-Based Augmentation System),即星基增强系统。通过地球静止轨道(GEO)卫星搭载卫星导航增强信号转发器,向用户播发星历误差、卫星钟差、电离层延迟等多种修正信息,实现对于原有卫星导航系统定位精度的改进,从而达到提高定位精度的目的。
-
【使用】模块使用天线几点注意事项
(1)K8系列模块匹配的天线增益范围:20 ~ 35dB
(2)天线使用上请注意正确放置方向,天线向上放置,环境尽量处于开阔环境。
(3)K8双天线模块主从天线安装的距离距离建议大于0.3m。
(4)用户可以根据不同型号的模块参数匹配符合的天线,只要天线支持相应模块的所有信号即可。
-
【参数】K8模块是否支持NAV信号
GALILEO卫星的广播星历分为两种:F/NAV (对应RTCM中1045)和I/NAV(对应RTCM中1046)。
F/NAV中的卫星钟差参数(a0,a1,a2)、toc和sisa来源于E5a-E1信号组合;
I/NAV中的卫星钟差参数(a0,a1,a2)、toc和sisa来源于E5b-E1信号组合;
目前K8模块只支持I/NAV信号。
-
【科普】惯性组合导航系统是什么
卫星导航(Satellite navigation)是指采用导航卫星对地面、海洋、空中和空间用户进行导航定位的技术,具有厘米级精度,但其绝对位置受多径、干扰、遮挡影响大,靠天吃饭。
惯性导航是指利用惯性元件(加速度计)来测量运载体本身的加速度,经过积分和运算得到速度和位置,从而达到对运载体导航定位的目的。组成惯性导航系统的设备都安装在运载体内,工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰,是一种自主式导航系统。但其精度会随时间发散,相对位置精度降低。
惯性组合导航是将卫星导航与惯性导航进行组合,优势互补,补充卫导失效的结果,轨迹连续,提高了系统的稳定性和可靠性。
K8系列模块具备板载IMU,融合高精度组合导航算法,不惧卫星信号中断,支持三维姿态输出,可完美满足智能驾驶对于高精度定位的需求。
-
【参数】K8模块组合导航常见问题
Q1:K8系列模块输出的组合导航信息有哪些?
定位组合信息,速度组合信息,航向组合信息。
Q2:K8系列模块组合导航支持的最大输出频率是?
最大输出频率为50HZ。
Q3:K823模块IMU精度是多少?
GNSS 天线信号失锁 3s,精度保持 cm 级 GNSS 天线信号失锁 10s,精度保持 m 级
Q4:K823模块的IMU初始化条件,如何判断初始化成功?
卫星数达到十五六颗+达到速度门限,载体速度达到 3m/s(可配置为1m/s),初始化成功后,COM1 输出初始化成功打印信息。
Q5:K823模块在卫星信号丢失后,IMU的保持时间多久?
默认维持300s,可以设置。可以调高/调低,但无法保障性能,失锁越久飞的越大。
-
【参数】GNSS数据质量评估指标
GNSS数据质量评估是确保GNSS观测数据准确性和可靠性的重要环节。以下是一些常用的GNSS数据质量评估方法:
数据完整性检查:检查观测数据是否完整,有无丢失或异常值。对于丢失的数据,需要分析其原因,如设备故障、信号遮挡等,并进行相应的处理。
信噪比分析:信噪比是评估GNSS数据质量的重要指标之一。较高的信噪比意味着观测数据质量较好,定位精度较高。通过分析信噪比的变化,可以判断观测条件是否稳定,以及是否存在多路径效应等干扰因素。
多路径效应分析:多路径效应是GNSS观测中常见的误差来源之一。通过分析多路径效应的影响,可以评估观测数据的可靠性,并采取相应的措施进行修正或剔除受影响的观测值。
残差分析:残差是指观测值与预测值之间的差异。通过分析残差的大小和分布,可以判断观测数据是否存在系统性误差或异常值,并评估模型的拟合程度。
精度评估:采集站点的观测数据,使用数据质量检查软件,处理数据可以评估GNSS观测数据的精度。例如UNVACO Facility 开发研制的 TEQC,司南配套的CompassSolution评估软件都可以进行分析处理得到观测数据质量结果。
稳定性评估:分析GNSS观测数据在时间序列上的稳定性,包括长期稳定性和短期稳定性。长期稳定性可以通过比较不同时间段的观测数据来评估,而短期稳定性可以通过分析相邻观测历元之间的差异来评估。
-
【科普】CGCS2000坐标系和WGS84坐标系的区别与联系
(1)CGCS2000:国家坐标系
CGCS2000坐标是2000.0历元的瞬时坐标,用于各种生产活动,强调统一性、规范性、自洽性、稳定性。
(2)WGS84:卫星导航坐标系
WGS84坐标是观测历元的动态坐标,用于导航,强调实时性、动态性。两者用途不同,特点不同,但都统一于ITRS坐标系,都对准ITRF框架。可通过历元归算、框架转换互相转换。
(3)区别联系:从坐标系定义可以看出,其原点、尺度、定向及定向演变的定义都是相同的,参考椭球也非常相近,扁率有微小差异,所以两者在当前的测量精度下是相容的。
两个椭球仅扁率有微小差异,引起同一点的坐标差异小于0.105mm。因此,在各类软件中如果没有CGCS2000坐标系选项,完全可用WGS84坐标系代替CGCS2000坐标系。